ロボット工学におけるステンレス鋼3Dプリンティング:高精度構造フレームとジョイント
はじめに
ステンレス鋼3Dプリンティングは、高度なロボットシステムにおいて、頑丈で軽量な構造フレームとジョイントを製造するために不可欠な高精度製造能力を提供します。金属3Dプリンティング技術、例えば選択的レーザー溶融(SLM)やダイレクトメタルレーザーシンタリング(DMLS)を活用することで、ステンレス鋼のような高強度材料、例えばSUS316LやSUS15-5PHを使用して、優れた機械的性能、耐食性、寸法精度を備えた複雑な部品を作成できます。
従来の製造方法と比較して、ロボット工学のためのステンレス鋼3Dプリンティングは、重量削減、構造的完全性の向上、カスタムロボット要素の迅速な試作のための設計最適化を可能にします。
適用可能な材料マトリックス
材料 | 引張強さ(MPa) | 降伏強さ(MPa) | 伸び(%) | 耐食性 | ロボット工学への適用適性 |
|---|---|---|---|---|---|
570 | 485 | 40% | 優れた | 構造フレーム、フレキシブルジョイント | |
1000 | 880 | 15% | 良好 | 高負荷アーム、回転ジョイント | |
1100 | 1000 | 10% | 良好 | 高強度ロボットリンケージ | |
520 | 220 | 55% | 非常に良好 | 軽量ブラケット、低負荷サポート | |
650 | 450 | 20% | 中程度 | 耐摩耗性回転部品 | |
700 | 500 | 15% | 中程度 | 耐摩耗性を必要とするロボットグリッピング要素 |
材料選択ガイド
SUS316L: 570 MPaの引張強さと40%の伸びを組み合わせたSUS316Lは、湿潤、クリーンルーム、または屋外環境で動作する軽量で耐食性のあるロボット構造フレームや関節ジョイントに理想的です。
SUS15-5PH: 1000 MPaに達する引張強さと880 MPaの降伏強さを備えたSUS15-5PHは、疲労抵抗性と安定性を要求する高負荷ロボットアーム、回転軸、およびベース構造に適しています。
SUS630/17-4PH: 優れた機械的性能(1100 MPa引張強さ)を提供するSUS630は、動的用途において高い剛性と一貫した負荷支持能力を必要とするロボット部品に選択されます。
SUS304L: 優れた成形性と耐食性を備えたSUS304Lは、非クリティカルなブラケット、軽量支持構造、およびロボットアセンブリの外部ケーシングに理想的です。
SUS410: 耐摩耗性を備えたマルテンサイト系ステンレス鋼(熱処理後硬度約400 HV)であるSUS410は、摩耗条件下で動作する回転ロボット部品やベアリングに使用されます。
SUS420: 焼入れ後に高い硬度(約550 HV)を提供するSUS420は、繰り返し機械的ストレスにさらされる摩耗しやすいロボットグリッピングツールやエンドエフェクタに使用されます。
プロセス性能マトリックス
属性 | ステンレス鋼3Dプリンティング性能 |
|---|---|
寸法精度 | ±0.05 mm |
密度 | >99.5% 理論密度 |
層厚 | 20–60 μm |
表面粗さ(プリント後) | Ra 5–15 μm |
最小特徴サイズ | 0.3–0.5 mm |
プロセス選択ガイド
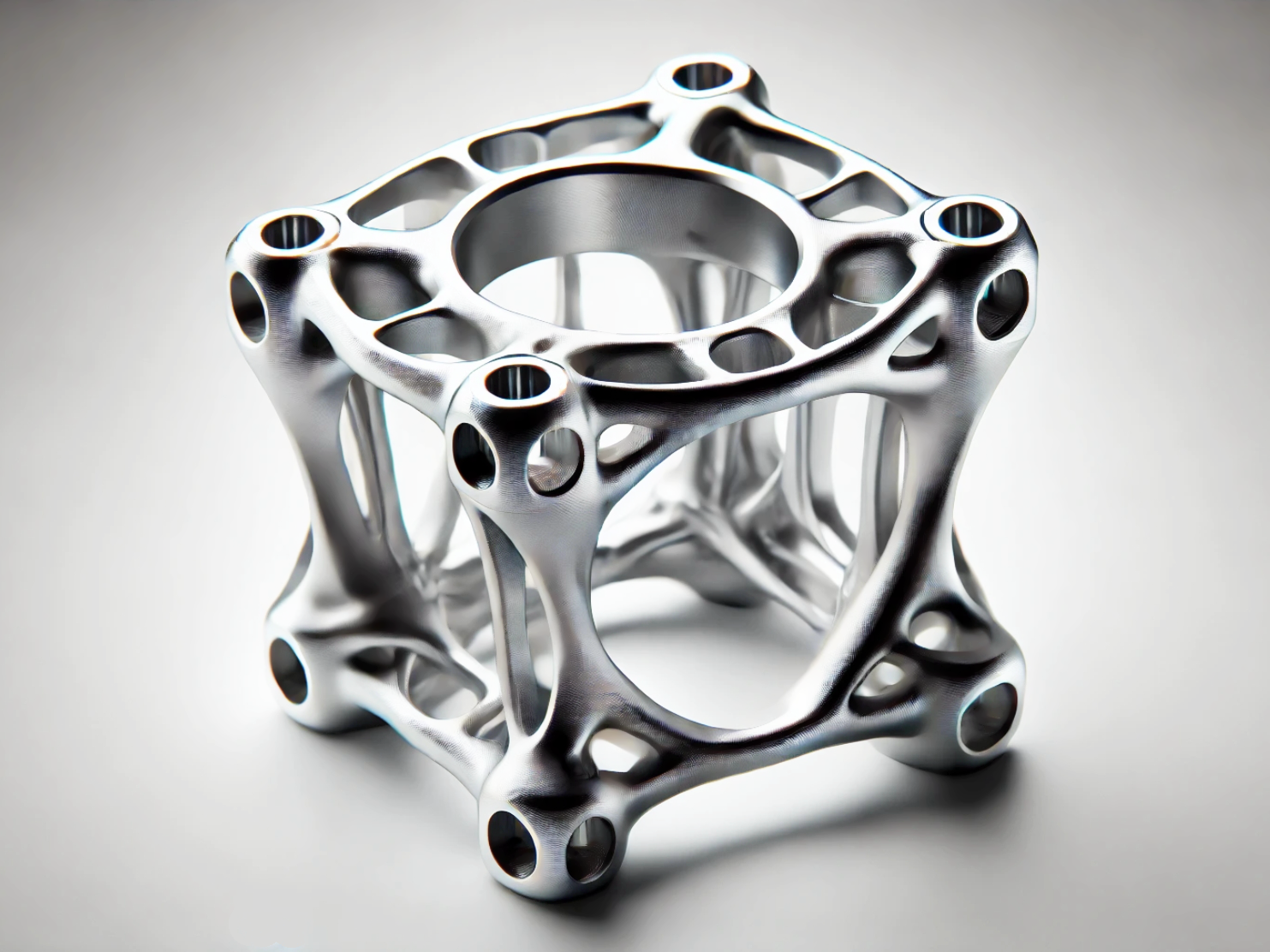
トポロジー最適化: ステンレス鋼3Dプリンティングにより、軽量構造フレームや格子構造を創成でき、強度を損なうことなく質量を最大30%削減できます。
統合アセンブリ機能: ジョイント、ヒンジ、統合ケーブル配線システムなどの複雑な部品を直接プリントでき、組立コストと弱点を最小限に抑えます。
優れた耐食性と耐摩耗性: SUS316LやSUS420などの材料は、過酷な産業、海洋、またはクリーンルーム環境でも長い耐用年数を保証します。
迅速な試作と反復: 高い設計自由度と迅速な納期により、ロボット部品の迅速なテストと改良が可能になります。
ケース詳細分析:産業オートメーション向けSUS15-5PH 3Dプリントロボットアームジョイント
ある産業用ロボットインテグレーターは、精密組立作業用に設計された6軸ロボットアーム用の高負荷で疲労抵抗性のあるジョイントを必要としていました。当社のステンレス鋼3DプリンティングサービスとSUS15-5PHを使用して、引張強さ1000 MPa、降伏強さ880 MPa、密度99.5%以上を達成する回転ジョイントを製造しました。トポロジー最適化設計により、従来の鋳造部品と比較して20%の重量削減が実現され、ロボットアームの速度とエネルギー効率が向上しました。後処理には、HIP処理と精密CNC加工が含まれ、厳しい位置合わせと表面仕上げの要件を満たしました。
産業応用
ロボット工学とオートメーション
高強度ロボットアームとマニピュレータリンケージ。
移動自律ロボット用軽量フレーム。
精密ジョイント、ヒンジ、フレキシブルカップリング。
産業機械
回転アクチュエータと精密運動部品。
コンパクトなアクチュエータマウントと統合構造サポート。
防衛・航空宇宙ロボット工学
UAVおよび検査ロボット用の軽量で耐食性のあるフレーム。
ロボットメンテナンスおよびハンドリング用の耐摩耗性グリッピングシステム。
ステンレス鋼ロボット部品向け主流3Dプリンティング技術タイプ
選択的レーザー溶融(SLM): 高密度で軽量なロボットフレームと精密負荷支持部品の作成に最適。
ダイレクトメタルレーザーシンタリング(DMLS): 非常に詳細で高精度なロボットジョイントと統合アセンブリに理想的。
バインダージェッティング: 構造的要求が低いステンレス鋼部品のコスト効率の良いバッチ生産に効果的。
よくある質問
3Dプリントロボットフレームとジョイントに最適なステンレス鋼グレードは何ですか?
ステンレス鋼3Dプリンティングは、ロボット構造設計をどのように改善しますか?
精密ロボット部品にはどのような後処理が必要ですか?
ステンレス鋼3Dプリンティングは、重負荷産業用ロボットに必要な強度を達成できますか?
3Dプリントされたトポロジー最適化は、ロボット性能にどのように利益をもたらしますか?
